Apunte: Dinámica de Cuerpos Vinculados
Leyes del movimiento de Newton, pilares de la dinámica, a través de ellas se generan las ecuaciones dinámicas del movimiento de cualquier sistema, que predicen el CAMBIO en el movimiento del sistema estudiado. A saber:
Principio de inercia
"Todo cuerpo permanece en estado de reposo o de movimiento rectilíneo y uniforme, a menos que actúe sobre él una fuerza resultante no nula. Dicho en otras palabras: para que un cuerpo posea una aceleración debe actuar sobre él una fuerza no equilibrada"
Principio de la fuerza
"Una fuerza no equilibrada aplicada a un cuerpo le comunica una aceleración, de la misma dirección y sentido que la fuerza, directamente proporcional a ella e inversamente proporcional a la masa, m, del cuerpo"
Principio de acción y reacción
"A toda fuerza [acción] se le opone otra [reacción] igual y opuesta. Es decir, si un cuerpo ejerce una acción sobre otro, este último ejerce también una acción, del mismo módulo y dirección, pero de sentido contrario, sobre el primero. Estas dos fuerzas, aunque opuesta, no se equilibran mutuamente, ya que no están aplicadas sobre el mismo cuerpo. Las fuerzas de acción y reacción siempre están aplicadas a cuerpos distintos"
Guía sugerida en el procedimiento para abordar problemas que requieren la aplicación de las leyes de Newton
• Dibuje un diagrama sencillo y claro del sistema.
• Aísle el cuerpo (u objeto) cuyo movimiento se analiza. Dibuje un diagrama de cuerpo libre para este objeto, es decir, un diagrama que muestre todas las fuerzas externas que actúan sobre él. Para sistemas que contienen más de un cuerpo, dibuje diagramas de cuerpo libre independientes para cada uno. No incluya en el diagrama de cuerpo libre las fuerzas que el cuerpo ejerce sobre sus alrededores.
• Observe que reconoce todos los pares de acción-reacción de interacción.
• Establezca ejes de coordenadas convenientes para cada objeto y determine las componentes de las fuerzas a lo largo de dichos ejes.
• Aplique la segunda Ley de Newton, ∑F = m.a, para cada componente y cada cuerpo/objeto.
• Verifique sus dimensiones para asegurar que todos los términos tengan unidades de fuerza.
• Resuelva las ecuaciones de componentes para obtener las incógnitas.
• Recuerde que se deben tener tantas ecuaciones independientes como incógnitas para poder obtener una solución completa.
• Verifique las predicciones de sus soluciones para valores extremos de las variables. Es posible que al hacerlo detecte errores en sus resultados.
Ejercicio de Cuerpos vinculados
Dos cuerpos de masa mA = 5 kg y mB = 3 kg están vinculados entre sí a través de una soga de masa ms=5 g, pequeña comparada con mA y mB. Se desprecia el rozamiento entre los cuerpos y el aire.
Se tira del cuerpo A con una fuerza cuyo módulo es |F| = 1000 N.
a) Realizar el diagrama de cuerpo libre para cada cuerpo y para la soga.
b) Indicar cuáles son los pares de acción-reacción.
c) Si la soga es inextensible (la distancia entre todo par de puntos pertenecientes a ella permanece constante), calcular la velocidad y la aceleración de cualquier punto de la soga, y la velocidad y la aceleración de los cuerpos.
d) Para cada cuerpo, determinar el valor de cada una de las fuerzas actuantes y el de la fuerza neta o resultante.
e) Si ms → 0, ¿qué sucede con la fuerza que la soga ejerce sobre cada cuerpo?
DIAGRAMA DE CUERPO LIBRE
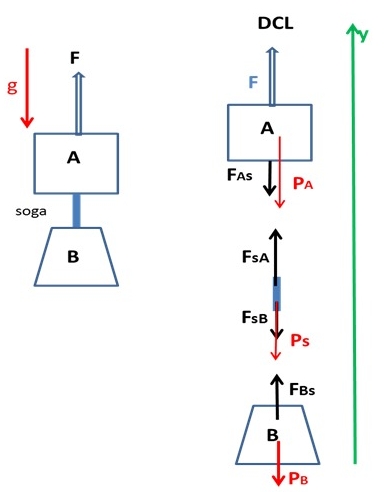
Desarrollo:
Denominamos a las fuerzas seg’un la siguiente convención:
Sobre A <--- FAS --> ejercida por S
Cuerpo A) eje y) F - FAS - PA = mA aAy (I)
Cuerpo S) eje y) FSA - FSB - Ps = ms asy (II)
Cuerpo B) eje y) FBS - PB = mB aBy (III)
 Consideraciones
Consideraciones
1) FSA = FAS por ser pares de acción reacción (par).
2) FSB = FBS por ser pares de acción reacción (par).
3) El par del peso de cada cuerpo está ubicado en la Tierra, dado que la fuerza peso es la fuerza (de interacción gravitatoria) ejercida por la tierra sobre el cuerpo en cuestión. Si quisiésemos seguir nuestra notación escribiríamos:
PA = PAT y P’A= PTA ídem para S y B
P’S= PTS y P’B= PTB
4) ¿Qué relación guardan las distintas aceleraciones? Nos dicen que la soga tiene una característica, es inextensible, ¿qué significa esto?
Significa que la distancia entre cualquier par de puntos de la soga (p y q por ejemplo) siempre es la misma, permanece constante (no se estira no se comprime), esto lo escribimos así
 |xq-xp| = d= constante
|xq-xp| = d= constante
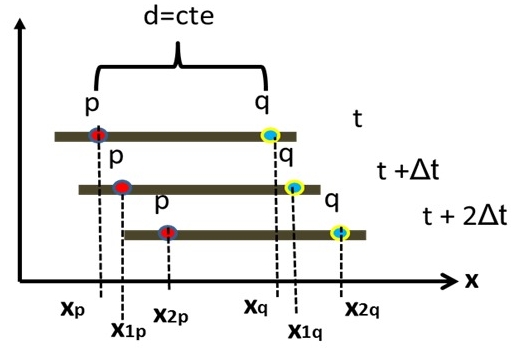
Observemos el gráfico de la izquierda: Para poder entender cuáles son las consecuencia de pedir que la soga es inextensible, simplificamos el estudio al eje x( podría ser cualesquiera); entonces directamente
d= xq-xp y se cumple además
d= x1q-x1p d= x2q-x2p
Entonces:
xq-xp = x1q-x1p si divido ambas lados de la igualdad por Δt obtengo
(xq - xp) / Δt = (x1q-x1p) / Δt distribuyo dentro de cada paréntesis
xq/ Δt - xp / Δt = x1q / Δt - x1p / Δt
Junto del mismo lado los términos que describen el mismo punto
x1p / Δt - xp / Δt = x1q / Δt - xq/ Δt
(x1p-xp ) / Δt = (x1q-xq ) / Δt --> vp media = vq media --> lím (Δt->0) --> vp = vq
Esto quiere decir que si la soga es inextensible TODOS sus puntos se mueven con IGUAL velocidad.
Les dejo a Uds. realizar una deducción similar para averiguar que
ap = aq
Una soga es inextensible TODOS sus puntos se mueven con IGUAL velocidad y aceleración.
5) Por lo tanto en el ejercicio:
aAy = aSy = aBy = a
6) Con estas consideraciones reescribamos las ecuaciones (I) (II) y (III)
Cuerpo A) eje y) F - FAS - PA = mA a (I)
Cuerpo S) eje y) FAS - FSB - Ps = ms a (II)
Cuerpo B) eje y) FSB - PB = mB a (III)
Ahora si el número de incógnitas (subrayadas) coincide con el número de ecuaciones y sólo nos queda resolver algebraicamente:
7) (i)La forma de resolver este sistema lde ecuaciones la eligen Uds. Yo en general utilizo esta :
Sumo los tres miembros de la derecha, e igualo , a la suma de los tres miembros de la izquierda:
(F - FAS - PA ) + (FAS - FSB - Ps )+ (FSB - PB ) = mA a + mS a + mB a
(ii) Observen que los términos FAS se cancelan porque están sumando y restando, ídem con FSB.
(iii) Por otra parte del lado derecho podemos sacar a factor común, y nos queda la siguiente ecuación:
F - PA - Ps - PB = (mA + mS + mB) a --> a = (F - PA - Ps - PB ) / (mA + mS + mB)
8) Datos : mA = 5 kg ; mB = 3 kg ; ms = 5 g y |F| = 1000kgf
(i) -> a = (1000N –50 N –30N – 0,05N) / (5+3+0.005) kg
a= 919,95 N / (8,005) kg = 114,922 m/s2
(ii) A partir de este resultado reemplazamos en (I), (II), (III) y obtenemos las distintas fuerzas:
FAS = 375,39 N y FSB = 374,77 N
Observen que difieren muy poquito esto se debe a que la masa de la soga es muy pequeña.
9) ¿Qué sucede si la masa de la soga tiende a 0? ( Ps --> 0)
La ecuación (II) FAS - FSB - Ps = ms a --> II ) FAS - FSB = ms a = 0
FAS = FSB
10) Como las sogas no pueden empujar y siempre están TENSAS en general denominamos a las fuerzas ejercidas por una soga TENSIÓN .Ojo la soga está en movimiento, está acelerada.
11) Los nuevos valores son (ms-->0): a = 920N/8kg = 115 m/s2 y FAS = FSB = 375N
Nuestras sogas tendrán de ahora en adelante características especiales: serán hilos muy delgados de masa pequeña (despreciable) e inextensibles, y las denominaremos sogas ideales.
Las sogas transmiten la misma fuerza, en el módulo, a lo largo de ella